Skills
Guidance and Control Algorithms
- Direct Collocation (Trajectory Optimization)
- Terminal and Homing Guidance Laws
- Linear and Nonlinear Autopilot Design and Analysis
- Optimal Control
- Multivariable Robust Control
- Numerical Optimization
Modeling and Simulation
- Aerospace Simulation Framework Design and Model Development
- MATLAB and Simulink
- C, C++, Python
- High Performance (Cluster) Computing
Projects
Rocket Powered Glider Flight Controls
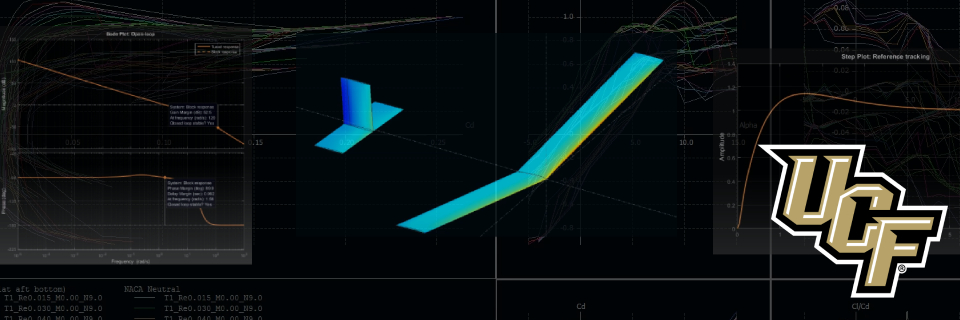
Working as an adjunct faculty member I developed a Senior Design project for the University of Central Florida Aerospace Engineering department. Students were required to design and built a model airplane scale glider with model rocket propulsion. As an aid for the students I put together a tutorial demonstrating aerodynamic predictions and flight controller design using MATLAB/Simulink and XFLR5.
YouTube Playlist
Apex Legends Trajectory Optimization
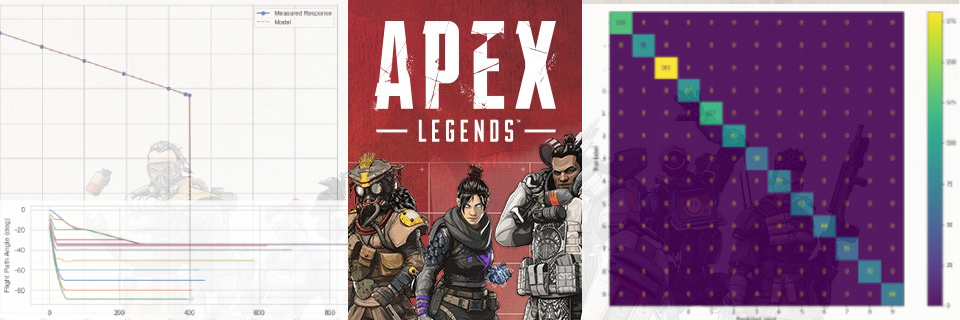
This project is still a work in progress, but the end goal is to validate the community derived method to best perform the initial flight maneuver in the Apex Legends game. In this manuever the goal is to travel from an initial launch point to a desired landing point in minimum time. In order to identify the in-game flight dynamics, I flew a variety of trajectories and reconstructed various states by scraping the on-screen position data. A Machine Learning model (SVM Classifier) was trained to perform the Optical Character Recognition (OCR) task in order to extract the position data from screen captures.
OCR Jupyter Notebook
Dynamics System ID Jupyter Notebook
Retirement Portfolio Allocation Analysis
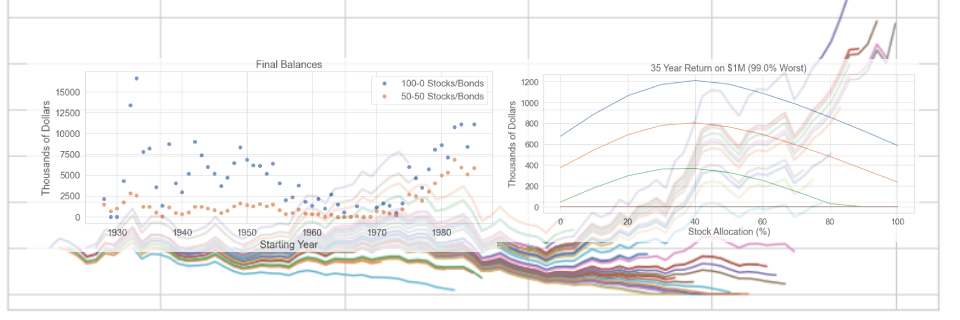
This project studied the effect of various stock/bond portfolio allocations in retirement. It includes an analysis of past returns as well as a Monte Carlo simulation of future performance using sampled growth and inflation figures.
Jupyter Notebook
Quadcopter Flight Controller
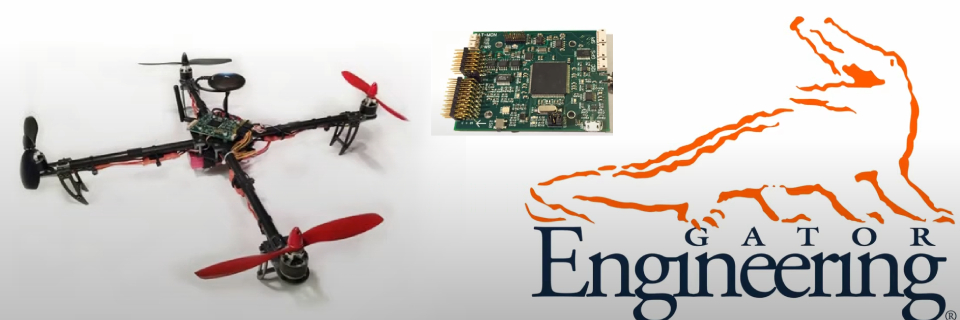
This project was done during the Spring of 2015 while I was in grad school at the University of Florida. It's a custom designed flight controller for a quadcopter. I designed the hardware from scratch and wrote all of the flight software. The flight software runs bare metal and includes all of the guidance, navigation, and control algorithms as well as the telemetry, sensor and motor interfaces.
YouTube Demo
LASF
Lightweight Aerospace Simulation Framework

Details about LASF...